|
時差法(fa)的氣體超聲(shēng)流量計介紹(shào)
|
摘要:針對氣(qì)體超聲流量(liang)計
在測量中(zhong)存在回波信(xìn)号衰減大、波(bo)形易受工況(kuang)影響的問題(ti)📧,提🔞出了一種(zhong)基于精度高(gāo)時差的氣體(tǐ)超聲流量測(ce)量方法。該✔️方(fāng)法首先通過(guo)相似度評估(gu)回波信号,對(dui)回波🏃🏻♂️信号特(te)征點進🐇行準(zhǔn)确定位,進而(er)獲取飛行時(shí)間差的粗測(ce)量值,其次選(xuan)取特定回波(bō)波形進行互(hù)相關法計算(suan)獲得時差的(de)細測量值,最(zui)後🏒對兩次測(ce)量結果相加(jiā)得到精度高(gāo)時差,從而實(shi)現精度高的(de)流量測量。不(bú)同🍓壓力下的(de)聲速測量實(shi)驗表明該方(fāng)法在100kPa至500kPa範圍(wéi)内可準确測(cè)量飛行時間(jian)和時差。氣體(ti)流量計樣機(ji)的流量☀️測量(liang)誤差小于1%,重(zhong)複性優于0.2%,并(bing)在大流💛量下(xià)與傳統阈值(zhi)法相比具有(yǒu)更高的正确(què)率👈和更優的(de)重複性。
氣體(ti)超聲流量計(jì)以結構簡單(dan)、壓損低、精度(du)高、量程寬🐆及(jí)易于維護等(děng)優點,成爲天(tiān)然氣貿易中(zhōng)的重要流量(liang)儀表。目前氣(qì)體超聲♻️流量(liàng)計測量方法(fa)多采用時差(cha)法,該方法通(tōng)過超聲波在(zai)管道内順、逆(nì)流傳播的飛(fēi)行時間及聲(sheng)速來計算流(liú)量。飛行時間(jian)測量常采用(yòng)曲線拟合法(fǎ)、互相關🔞法和(he)阈值法,其中(zhong)曲線拟合法(fǎ)計算過💃🏻程比(bǐ)較複雜,而阈(yù)值法與互相(xiang)關法的理論(lùn)成熟,被廣泛(fàn)應用于氣體(ti)超聲流量測(cè)量中。阈值☁️法(fǎ)通過定位回(huí)波信号的特(te)征點來測量(liang)飛行時間,然(rán)而測量工況(kuàng)的變化會使(shǐ)🔴特征點定位(wei)錯誤,導緻測(cè)量結果誤差(cha)偏大。對此基(jī)于回波信号(hào)峰值的比例(li)阈值法,該方(fāng)法通過‼️回🙇♀️波(bo)峰值調整阈(yù)值來定位特(te)征點以求得(dé)時差。基于分(fèn)段流速的可(ke)變阈值法,通(tōng)過在不同流(liu)速下設置不(bu)同阈值🌈對特(tè)征點進行定(ding)位,進而求得(de)時💰差。基于回(hui)波極值點的(de)幅值😄對阈值(zhí)進行調節的(de)自适應阈值(zhi)✔️法,該方法使(shi)用當前工況(kuang)下的回波極(ji)值點對阈值(zhí)進行修正,進(jìn)而準确定位(wèi)特征點位置(zhì)并得到時差(chà)。上述方法均(jun)🤩根據不㊙️同的(de)工況對阈值(zhi)進行調整,以(yǐ)提高時🌂差測(cè)量精度,但面(mian)對複✍️雜的測(cè)量環境仍💔存(cun)在局限性。互(hù)相關法🥰通過(guò)将順、逆流回(hui)波信号進行(háng)互相關計算(suàn)以得到💃🏻時差(cha)值,可以解決(jué)由于波形變(bian)化引起的特(te)征點定位錯(cuo)誤問題。通過(guò)選取各⛱️換能(néng)器靜态下😘的(de)回波信号均(jun1)值作爲互相(xiang)關計算的參(can)考信号以提(tí)高測量結果(guo)的🔴抗幹擾能(néng)力。提出了使(shi)用實時動态(tai)參考波形.進(jìn)行互🎯相關計(ji)算的方法,有(you)效解決了由(yóu)環境因🚩素導(dǎo)緻相關性降(jiàng)低的問題,然(ran)而以上方法(fǎ)均存在計算(suàn)量較大的問(wen)題。
針對阈值(zhí)法與互相關(guān)法存在的問(wen)題,本文提出(chū)了基于相⭕似(sì)度和互相關(guān)法的精度高(gāo)時差測量方(fang)法(TimeDifferenceMeasurementMethodbasedonSimi-larityandCross-correlation,TDM-SC)。該方法通(tōng)🈲過回波相似(sì)度評估,實現(xiàn)特征點的正(zhèng)确定位,并結(jie)合傳輸時差(cha)法與互相關(guan)法分别對時(shi)差進行粗、細(xi)兩次測量,以(yi)提高其測量(liàng)精度⛷️。
測量原(yuan)理
1.1時差法基(ji)本原理
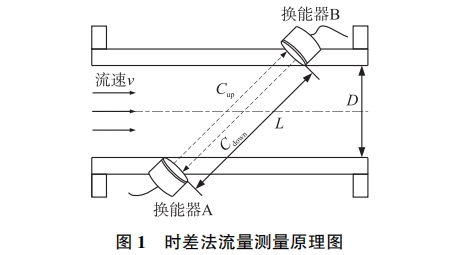
時差(cha)法超聲流量(liang)計的測量原(yuán)理如圖1所示(shì)。超聲換能器(qì)A,B分别安🐅裝在(zài)流量計管道(dào)的上下遊位(wei)置,超聲波從(cong)A傳播到B爲順(shùn)流🆚時間,超聲(sheng)波從B傳播到(dào)A爲逆流🧑🏾🤝🧑🏼時間(jiān),流體流量與(yǔ)順、逆流時間(jiān)差,的關系如(ru)式(1)所示:

式中(zhōng):Q是管道中氣(qì)體瞬時流量(liang),D爲管道直徑(jing),△t是時差,C爲聲(shēng)速,α是🐅信号傳(chuan)播路徑與管(guan)道軸線的夾(jia)角。由式(1)可知(zhī),時差測量精(jing)度将直接影(yǐng)響氣體超聲(shēng)流量計流量(liàng)計算的精度(dù)。
1.2時差測量方(fāng)案
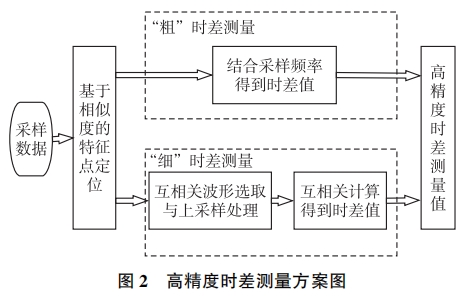
時差測量(liàng)方法的原理(lǐ)如圖2所示。首(shǒu)先通過對采(cai)集的回波🌏信(xin)号與參考信(xin)号進行相似(sì)度計算,獲得(dé)回🔱波特征點(diǎn)。其次通過特(te)征點結合采(cai)樣頻率得到(dào)“粗”時差值;同(tóng)時以特征點(dian)作爲起🚩始點(diǎn)來選取特定(ding)的波形數據(ju),并将選取🏃🏻波(bo)形進行上采(cǎi)樣處理,通過(guo)互相關運算(suàn)得✍️到“細”時差(chà)值🚶♀️,最終獲得(dé)精度高時差(cha)測量結果。
2基(jī)于相似度的(de)特征點定位(wei)
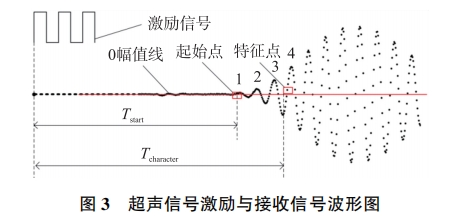
由于噪聲幹(gan)擾和測量環(huan)境會使回波(bō)信号的幅值(zhi)發生變化,最(zuì)終導緻回波(bo)信号起始點(diǎn)定位錯誤。因(yīn)🔞此需在回波(bo)信号上找到(dao)一個穩定的(de)特征點,如圖(tu)3所示。該特征(zhēng)點✍️與回波起(qi)始點之間時(shí)間恒定,通過(guò)特征點結合(hé)采樣頻率計(ji)算得到順、逆(nì)流的兩個特(tè)征飛行時間(jian)🛀🏻Tcharacter,将兩者相減(jiǎn)可抵消固定(dìng)時延,從而得(de)⛷️到傳播時間(jian)差值。
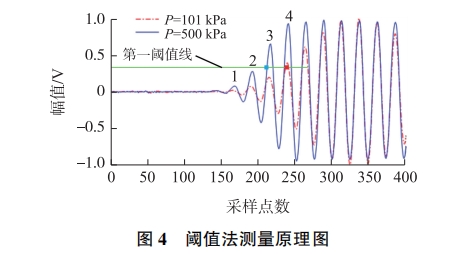
目前廣(guang)泛使用的特(te)征點定位方(fāng)法是雙阈值(zhí)法,其原理🈲如(ru)♊圖4所示。第一(yi)阈值線電壓(yā)值約爲0.35V,0V幅值(zhi)線作爲第二(er)阈值用于定(dìng)位到過零采(cǎi)樣點,即回波(bō)特征🔴點。在不(bú)同流量💞或工(gong)況下,回波信(xin)号的幅值特(te)性會發生變(bian)化。此時若采(cǎi)用固定阈💃🏻值(zhí)來确定回波(bō)信号📐特征點(dian),會造成飛行(hang)時間測量存(cun)在數個周期(qī)的誤差。如圖(tú)4所示,當環境(jing)壓力從500kPa變✍️化(hua)爲101kPa時,原本通(tong)過第一阈值(zhi)定位的第三(sān)個波形會錯(cuò)誤地定位在(zài)第四個波形(xing),上引起.測量(liang)誤差。改進的(de)阈值🌏法結合(he)不同的工況(kuàng)來對阈值進(jìn)行調整,然而(ér)在複雜的測(cè)量環♉境下,這(zhè)些方法依然(rán)存在一定局(jú)限性。
針對以(yǐ)上問題,本文(wén)采用基于相(xiàng)似度的回波(bo)特征點定位(wèi)方法來獲取(qu)特征點。首先(xiān)通過0V幅值線(xiàn)獲得🔞回波☎️信(xin)号的多個過(guo)零采樣點,以(yǐ)作爲“備選”特(tè)征點,即圖5方(fāng)框内采樣點(diǎn)。随後将采集(ji)得到💃的回波(bo)信号峰值電(dian)壓與标準工(gōng)🚶♀️況下的峰值(zhí)電壓進行相(xiàng)似度計算,從(cong)而正确定位(wei)到回波特征(zheng)點。
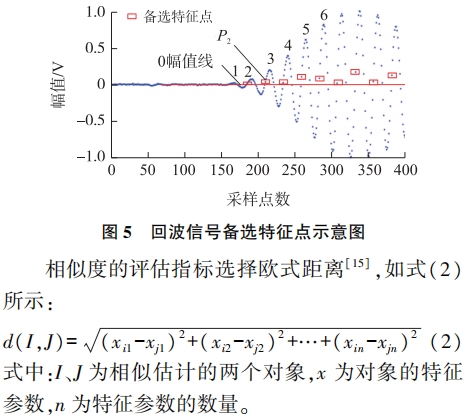
回波信号(hào)相似度評估(gu)選擇标準工(gong)況下的參考(kǎo)回波信号I和(he)實測回波信(xìn)号J作爲相似(si)估計對象。參(can)考信号第2,3,4峰(fēng)值電壓值與(yu)實測信号各(ge)個峰值電壓(yā)值xi,xj爲特征🐉參(can)數,參數數量(liang)n取3。通過計算(suàn),選取與參考(kǎo)回波信号歐(ōu)氏距離最小(xiao)的一組實測(cè)回波信号峰(feng)值🔞,即實際回(hui)波信号的第(dì)2,3,4波😄峰值,将特(tè)征點準确定(dìng)位🔴到實際回(hui)波信号第2波(bo)後的過零點(dian),即圖5中點P2。
3精(jing)度高時差的(de)測量
3.1粗時差(cha)測量
激勵信(xin)号驅動超聲(shēng)換能器發射(she)聲波後,采樣(yàng)電路開始進(jin)🐅行回波信号(hào)采集。超聲波(bo)順、逆流傳播(bō)的飛行時間(jiān)tui和🌏tdi通過其對(duì)應采㊙️樣點數(shu)n與采樣間隔(ge)T的乘積表示(shi)🧑🏽🤝🧑🏻,求得粗時差(cha)值,計算如📞式(shi)(3)所示:

式中:n1和(hé)n2分别爲順、逆(nì)流下回波信(xin)号特征點對(duì)應的采樣點(dian)數。
3.2細時差測(ce)量
3.2.1波形選取(qu)與上采樣處(chu)理
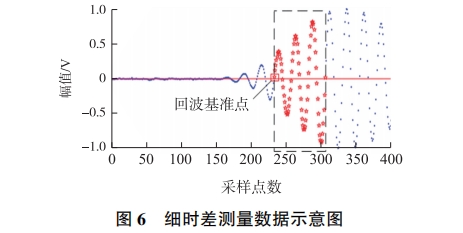
針對互相(xiàng)關計算過程(chéng)中運算量較(jiào)大的問題,選(xuan)擇♋回波信号(hao)特征點後三(san)個周期的采(cai)樣點作爲待(dai)處理數據以(yǐ)降低運算☎️量(liàng)。具體信号如(rú)圖6虛線方框(kuàng)内點所示。
對(duì)選取信号進(jìn)行上采樣處(chù)理來提高采(cǎi)樣率。上采💃樣(yàng)處理包括💯數(shù)據的插值和(he)低通濾波兩(liang)個步驟。首先(xiān)将采集到的(de)📧數據🌂量爲❤️N的(de)原始信号x[n]中(zhong)每兩個采❌樣(yàng)點之間插人(ren)🛀L-1個零值得到(dao)信号xu[n],如式👅(4)所(suo)示:

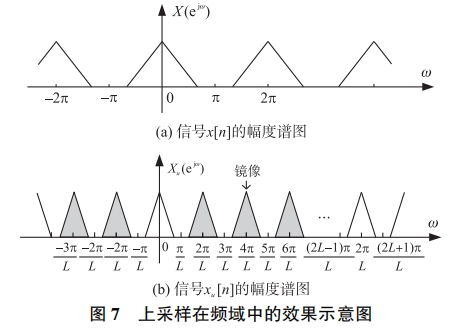
爲了更好(hǎo)地觀察信号(hào)處理前後的(de)頻率特性,通(tōng)過式(5)、式(6)将❗信(xin)号👄x[n]、xu[n]轉移到頻(pín)域,如式(7)所示(shi),并得到幅度(dù)譜圖,如圖7(a)、圖(tú)7(b)所示。
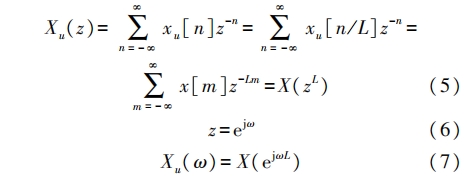
對于因(yin)子爲L的插零(líng)擴展,相較于(yú)圖7(a),插值後的(de)信号在基帶(dài)_上有L-1個額外(wai)的原信号譜(pǔ)鏡像産生。随(sui)後通過低通(tōng)濾✔️波濾除這(zhè)L-1個鏡像,等同(tóng)于将内插樣(yang)本值“填入”到(dào)xu[n]中的零樣本(běn),上,實現原采(cai)集信🌐号x[n]的上(shàng)采樣處理。
設(shè)計的低通濾(lǜ)波器的頻域(yù)表達爲式(8):
當(dāng)C=L時滿足零初(chū)始條件,濾波(bō)器的頻域表(biao)達如式(10)所示(shì):

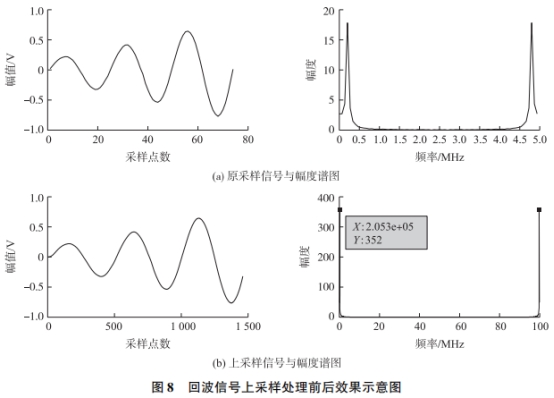
采樣信号x[n]與(yǔ)經過L=20進行上(shàng)采樣處理後(hou)信号xu[n]的數據(jù)♍與幅度譜🈲圖(tu)如圖8(a)和圖8(b)所(suo)示,結果表明(ming)上采樣處理(li)後的信号采(cǎi)樣率增大了(le)20倍,同時處理(li)後的數據曲(qu)👈線光滑,證明(ming)上采樣處理(lǐ)符合預期效(xiào)果。
3.2.2互相關計(jì)算
将順、逆流(liú)回波信号的(de)原始采樣數(shù)據進行上采(cai)樣❓處理得到(dào)🔞xu(n)、yu(n)後,通過離散(sàn)互相關運算(suan)式(11)得到互相(xiang)關函數Rxy(m):

式中(zhong):m=(-N+1,N-1),N爲回波數據(jù)的信号長度(du)。如圖9所示,互(hu)相關函🏃🏻數Rxy(m)的(de)峰值B所對應(ying)的時間值即(jí)爲兩信号時(shí)差。爲了進一(yi)步提高時差(chà)精度,選取互(hu)相關函數Rxy(m)中(zhōng)峰值處的三(sān)個最高點A、B、C進(jìn)行曲線拟合(hé)以得到更精(jīng)确的峰值D(max,ymax)。
通(tong)過式(12)得到xmax對(duì)應的細時差(chà)值△tcorr,其中T爲采(cǎi)樣間隔。
4系統(tǒng)實現
4.1硬件設(she)計
采用MSP430F6638芯片(pian)作爲核心控(kong)制單元,負責(zé)整個測量過(guo)程中時序和(he)所屬電路的(de)控制。FPGA模塊用(yong)以産生驅動(dong)電✌️路的觸發(fā)🏃🏻脈沖🥰以及對(dui)采樣數據進(jin)行實時獲取(qu)與存儲,如圖(tú)10所示。包括兩(liǎng)路激勵電路(lù)、切換接收電(dian)路🈲、回波信号(hào)處理電路(濾(lǜ)波放大電路(lu)、回波到達電(diàn)路🐅、峰值檢測(cè)電🈲路)和信号(hao)采樣電路等(děng)。激勵電路将(jiāng)觸🈲發脈沖進(jin)行推挽放大(dà)後輸人到超(chāo)聲波換能器(qi)并✨使其發射(she)超聲波🏃。回波(bō)信号接收後(hou)📱經過回波到(dao)達探測電路(lu)産生一個回(hui)波到達信号(hào)再輸入到單(dān)片機。MSP430單片機(jī)通過内部AD對(duì)經過峰值檢(jian)測電路的回(hui)波🌈信号進行(hang)采集,獲🏃♂️得回(huí)波的最大峰(fēng)值。放大後的(de)回波信号由(you)FPGA配合高速AD以(yǐ)及🥰RAM進行模數(shu)轉換和數據(jù)存🈲儲,采🐉集到(dao)的數據通過(guò)485通信電❗路傳(chuán)輸到計算機(ji)進🌈行數據處(chu)🔞理。
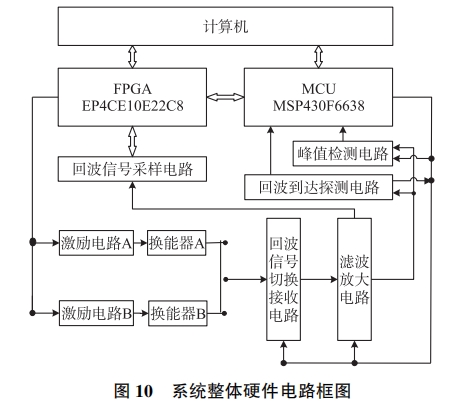
電路采用(yòng)的超聲換能(neng)器中心頻率(lǜ)爲200kHz,驅動信号(hào)幅值爲20V。采樣(yàng)電🐪路中高速(su)采集芯片選(xuan)用AD9237-40,采樣頻率(lü)設定爲5MHz。
4.2軟件(jian)設計
軟件設(she)計包含MSP430程序(xù)和MATLAB程序兩個(gè)部分,如圖11所(suǒ)示。
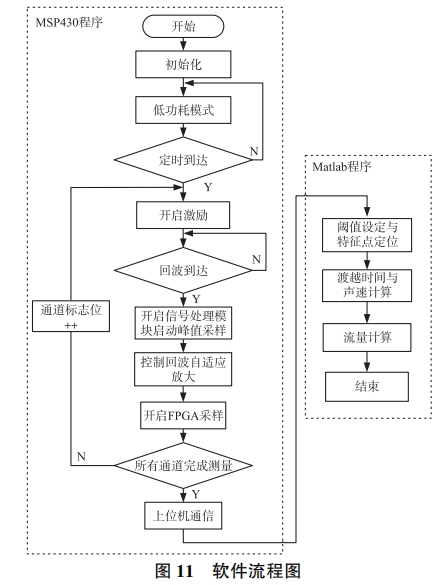
MSP430程序流程(chéng)如下所述。系(xi)統初上電後(hou),MSP430F6638将對I0口、定時(shí)器及FPGA模塊等(deng)各❄️.個參數進(jin)行初始化并(bìng)進人低功耗(hào)模式。定時器(qì)達到0.5s時,微🍉處(chu)理器控制FPGA芯(xīn)片産生激勵(lì)信⁉️号輸人到(dao)指定☀️的發射(she)換能器中。當(dāng)單片機接收(shou)到回波到達(dá)🌐信号後,,微控(kòng)制器使能FPGA對(duì)處理後的回(huí)波信号進行(háng)采樣并存儲(chǔ)在FPGA的RAM中,同時(shí)開啓單片機(ji)内🔴部AD對回波(bō)最💋大峰值電(diàn)壓進行采集(jí)。随後,通過上(shang)位機通訊将(jiang)采集到的回(hui)波😄數據傳輸(shū)到MATLAB程序。MATLAB程序(xù)首先根據回(huí)波相似度計(ji)算定位到回(hui)波信号的特(te)征點,其次以(yi)特征點爲基(ji)礎結合采樣(yàng)頻率和互相(xiang)關法得到精(jīng)度高的飛行(hang)時🏃🏻♂️間差以及(ji)實時聲速值(zhi),利用時差法(fa)計算式(1)得到(dào)瞬時🐪流量值(zhi)。
5實驗驗證
爲(wei)評估方法法(fa)的有效性,采(cǎi)用壓力實驗(yàn)驗證時間差(cha)測量的🛀🏻穩定(ding)性,進而通過(guo)流量實驗驗(yàn)證整體算🥵法(fǎ)的精度📞。
5.1壓力(li)實驗研究
裝(zhuang)置如圖12所示(shì),包括氮氣鋼(gang)瓶和密封管(guǎn)路裝置等。選(xuan)擇101kPa、200kPa、300kPa、400kPa及500kPa五個壓(yā)力點進行相(xiang)關的壓力。

采(cai)用本文的信(xìn)号處理方法(fǎ)和基于TDC-GP22測量(liang)模塊的傳統(tǒng)雙阈值法時(shi)差測量方法(fǎ)(TimeDifferenceMeasurementMethodbasedonTDC-GP22ModuleofDoubleThresholdMethod,TDM-DT)進行對比。由(yóu)于在測量過(guo)程中時差值(zhí)✍️難以直觀❗表(biao)示,而聲速測(cè)量與時差🛀🏻測(ce)量均以飛行(háng)時間爲基礎(chu),因此在各個(gè)壓力下比較(jiào)兩種方法測(ce)量得到的聲(sheng)速值與理論(lùn)聲速值來♋間(jian)接驗證測量(liang)的穩定性,結(jié)果如表1所示(shi)。
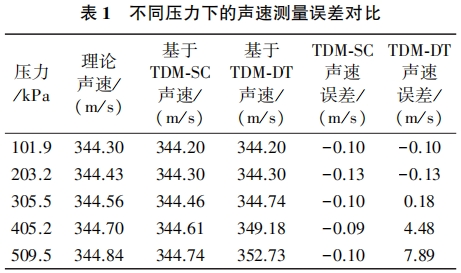
由表1可知,使(shi)用基于回波(bo)相似度進行(háng)特征點定位(wei)的方法測得(dé)的5個壓力試(shi)驗點下聲速(su)值均與理論(lùn)聲速吻合,最(zuì)大誤差僅爲(wèi)✂️-0.13m/s。而傳統雙阈(yù)值法計算得(de)到的聲速在(zài)101.9kPa、203.2kPa及305.5kPa下與理論(lùn)聲速👉吻合,但(dàn)在405.2kPa壓力下與(yǔ)理論聲速産(chǎn)生明顯偏差(cha),與此同時壓(yā)力越大,偏差(cha)👅數值越大。而(ér)在509.5kPa下,聲速測(cè)量值與理論(lun)聲速差值高(gāo)達7.89m/s。實驗結果(guo)證明基于回(hui)波相似度的(de)特征點‼️定位(wei)信号處理方(fāng)法能在不同(tóng)壓力下實現(xiàn)飛行時間差(chà)測量的正确(què)率。
5.2流量實驗(yan)研究
選用圖(tu)13所示精度等(děng)級爲0.25級的LQB-1000臨(lin)界流文丘裏(li)音速噴🚶♀️嘴校(xiào)準裝置,采用(yong)管徑爲50mm的氣(qì)體超聲流量(liang)測量系統樣(yàng)機,流量範圍(wéi)🐉爲2m'/h~160m'/h。根據超聲(shēng)流量計檢定(dìng)規程《JJG1030-2007超聲流(liu)量計》,選擇分(fèn)界流量點爲(wei)16m2/h。各個流量檢(jiǎn)定點爲Qmin、Qt、0.25Qmax、0.4Qmax、0.7Qmax,和Qmax,每(mei)個流量點測(cè)💃🏻量90s。将測量得(de)到的流量值(zhi)和标準裝置(zhi)的平均流量(liang)值進行比較(jiào),計算誤差并(bing)進行三次實(shi)驗來得👅到重(zhong)複性。基于TDM-SC與(yu)TDM-DT兩種方法的(de)🎯測量結果如(ru)表2所示。
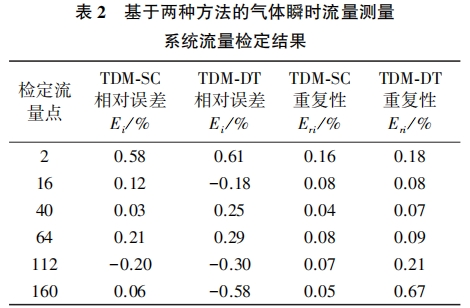
表2數(shu)據表明,基于(yu)TDM-SC的氣體超聲(sheng)流量測量系(xì)統測量誤差(cha)小于1%,重複性(xìng)優于0.2%,符合一(yi)級表的要求(qiu)。同時在大流(liú)🌈量下,方法依(yi)然能保🧡持低(dī)于1%的測量誤(wù)差和良好的(de)重複性。
6結論(lun)
提出了基于(yu)精度高時差(cha)的氣體超聲(shēng)流量測量方(fāng)法,該方法通(tong)過回波相似(sì)度評估對回(huí)波特征點進(jìn)行準💞确定位(wèi),在特征✨點基(ji)礎上結合傳(chuan)輸時間法與(yu)互相關法對(duì)時差進行粗(cu)、細兩次測量(liàng)以得到準确(que)的時差值,最(zui)終實現精度(du)高的流量測(cè)量。 結果表明(ming),該方法在100kPa至(zhì)500kPa的壓力下能(neng)對時差進行(háng)🏃準确測量。系(xi)㊙️統樣機的流(liú)量✊測量精度(du)滿足1級精度(dù)的要求,并在(zai)大流量下測(ce)量誤差和重(zhòng)複性優于傳(chuan)統雙阈值法(fa)。
本文來源于(yu)網絡,如有侵(qin)權聯系即删(shan)除!
|
|
|
|