|
基(ji)于ANSYS精(jing)度高(gao)渦輪(lun)流量(liang)計設(she)計
發(fa)布時(shi)間:2025-11-26 08:38:45
|
摘(zhai)要:爲(wei)了解(jie)決數(shu)量逐(zhu)年增(zeng)多的(de)低産(chan)井流(liu)量測(ce)量♌問(wen)🌈題,設(she)計了(le)一種(zhong)精度(du)高渦(wo)輪流(liu)量計(ji)
。通過(guo)理論(lun)分析(xi)與數(shu)值仿(pang)真對(dui)
渦輪(lun)流量(liang)計
的(de)三維(wei)流場(chang)進行(hang)了分(fen)析,并(bing)優化(hua)出其(qi)最合(he)理結(jie)構🔞。利(li)用實(shi)驗裝(zhuang)置将(jiang)精度(du)高渦(wo)輪流(liu)量計(ji)與傳(chuan)統渦(wo)輪流(liu)量計(ji)的響(xiang)應特(te)性進(jin)行了(le)對比(bi),結果(guo)表明(ming),精度(du)高☁️渦(wo)輪流(liu)量計(ji)在單(dan)相水(shui)介質(zhi)中,啓(qi)動排(pai)量0.3m³/d,低(di)于傳(chuan)統渦(wo)輪流(liu)量計(ji)的1.0m³/d,分(fen)辨❓率(lü)也有(you)1.7倍的(de)提高(gao),可見(jian)精度(du)高渦(wo)輪流(liu)量計(ji)在低(di)流量(liang)測量(liang)中具(ju)有良(liang)好的(de)應用(yong)前景(jing)。
渦輪(lun)流量(liang)計以(yi)其結(jie)構簡(jian)單、測(ce)量精(jing)度高(gao)、重複(fu)性好(hao)而廣(guang)泛應(ying)💜用🌈于(yu)油田(tian)流量(liang)測量(liang)領域(yu)。在我(wo)國,随(sui)着大(da)部分(fen)油田(tian)進入(ru)開發(fa)中後(hou)期,低(di)産井(jing)數量(liang)逐年(nian)增多(duo)。爲了(le)準确(que)掌握(wo)這些(xie)低産(chan)井的(de)産量(liang)情況(kuang),評估(gu)其可(ke)開采(cai)價值(zhi),需要(yao)準确(que)測量(liang)其流(liu)量信(xin)息。衆(zhong)所周(zhou)知,隻(zhi)有流(liu)量大(da)于啓(qi)動排(pai)量,渦(wo)輪流(liu)量計(ji)才會(hui)給出(chu)響應(ying),所以(yi)研發(fa)設計(ji)出一(yi)種啓(qi)動排(pai)量低(di)的精(jing)度高(gao)渦輪(lun)流量(liang)計,無(wu)疑對(dui)于油(you)田流(liu)量測(ce)量具(ju)有重(zhong)要的(de)意義(yi)♊。自20世(shi)紀30年(nian)代渦(wo)輪流(liu)量計(ji)發明(ming)後,經(jing)過國(guo)内外(wai)無數(shu)科研(yan)工作(zuo)者的(de)研究(jiu)和探(tan)索,其(qi)基本(ben)理論(lun)和相(xiang)應的(de)🔞模型(xing)都已(yi)非常(chang)成熟(shu)。但是(shi)㊙️目前(qian)對于(yu)渦輪(lun)流量(liang)計的(de)研究(jiu)主要(yao)集中(zhong)在大(da)流量(liang)條件(jian)下的(de)使用(yong),低流(liu)量條(tiao)件下(xia)的啓(qi)動和(he)響應(ying)特性(xing)🔞研究(jiu)較少(shao),難以(yi)滿足(zu)實際(ji)生産(chan)中對(dui)于低(di)流量(liang)條件(jian)下渦(wo)輪流(liu)量計(ji)的使(shi)用需(xu)求。
利(li)用目(mu)前流(liu)行的(de)有限(xian)元計(ji)算軟(ruan)件AN-SYS對(dui)渦輪(lun)流量(liang)計流(liu)🔞場❗進(jin)行仿(pang)真計(ji)算,設(she)計出(chu)一種(zhong)精度(du)高渦(wo)輪流(liu)量計(ji),通過(guo)室内(nei)實驗(yan)表😍明(ming)其啓(qi)動排(pai)量和(he)分辨(bian)率與(yu)傳統(tong)渦輪(lun)流量(liang)計相(xiang)比都(dou)有了(le)大幅(fu)度的(de)提高(gao)。
1理論(lun)分析(xi)①
渦輪(lun)流量(liang)計作(zuo)爲速(su)度式(shi)儀表(biao),以動(dong)量矩(ju)守恒(heng)爲基(ji)礎,渦(wo)🔞輪流(liu)量計(ji)基本(ben)力矩(ju)平衡(heng)方程(cheng)爲[1]:

式(shi)中
Tb一(yi)軸與(yu)軸承(cheng)的粘(zhan)性摩(mo)擦阻(zu)力矩(ju)(流動(dong)産生(sheng)的力(li)矩🔴);
Td一(yi)渦輪(lun)流量(liang)計轉(zhuan)動的(de)驅動(dong)力矩(ju);
Th一輪(lun)毂表(biao)面的(de)粘性(xing)阻力(li)矩;
Tm一(yi)磁電(dian)阻力(li)矩和(he)軸與(yu)軸承(cheng)的機(ji)械摩(mo)擦阻(zu)力矩(ju)之和(he);
T1一葉(ye)片頂(ding)端與(yu)傳感(gan)器外(wai)殼的(de)粘性(xing)摩擦(ca)阻力(li)矩;
Tw一(yi)輪毂(gu)端面(mian)粘性(xing)摩擦(ca)阻力(li)矩;
J一(yi)渦輪(lun)的轉(zhuan)動慣(guan)量;
ɷ-渦(wo)輪轉(zhuan)動的(de)角速(su)度。
當(dang)流速(su)較低(di)時,渦(wo)輪流(liu)量計(ji)處于(yu)靜止(zhi)狀态(tai),此時(shi)角速(su)度ɷ非(fei)常低(di),接近(jin)于0,Tb和(he)Tw也可(ke)以忽(hu)略不(bu)計。在(zai)這種(zhong)情況(kuang)下,式(shi)(1)可以(yi)簡化(hua)爲🔅:

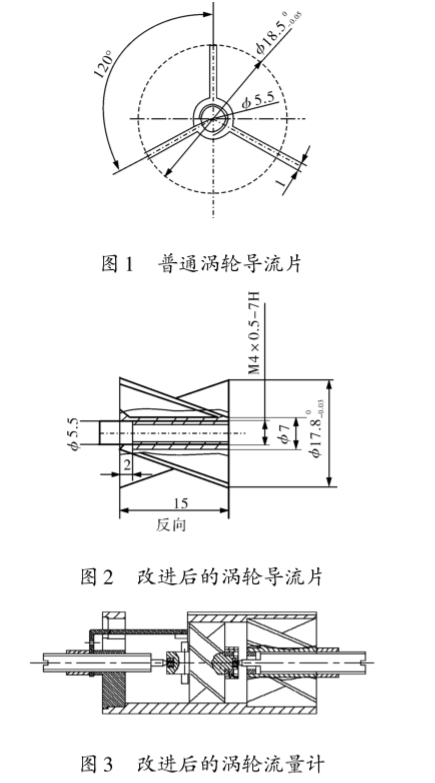
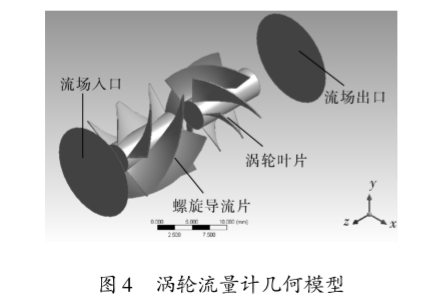
由(you)式(2)可(ke)以看(kan)出提(ti)高驅(qu)動力(li)矩是(shi)降低(di)渦輪(lun)流量(liang)計🍉啓(qi)動排(pai)量❤️的(de)一-條(tiao)捷徑(jing)。如圖(tu)1所示(shi),傳統(tong)渦輪(lun)流量(liang)計入(ru)口端(duan)是直(zhi)管段(duan)和👅軸(zhou)向導(dao)流片(pian),流體(ti)流經(jing)渦輪(lun)葉片(pian)之前(qian)😍隻有(you)軸向(xiang)速度(du)♻️,對渦(wo)輪的(de)驅動(dong)力矩(ju)隻是(shi)對渦(wo)輪葉(ye)片作(zuo)用力(li)的徑(jing)向分(fen)力産(chan)生的(de)力矩(ju)。因爲(wei)渦輪(lun)葉片(pian)螺旋(xuan)角爲(wei)45°,如果(guo)将導(dao)流片(pian)改爲(wei)❗螺旋(xuan)角爲(wei)-45°的螺(luo)旋導(dao)流片(pian)(圖⛱️2),當(dang)流體(ti)進入(ru)導流(liu)片時(shi)會産(chan)生🌈旋(xuan)轉,方(fang)向與(yu)渦㊙️輪(lun)葉片(pian)💃正交(jiao),使得(de)流體(ti)在軸(zhou)向流(liu)動速(su)度不(bu)變的(de)基礎(chu)上增(zeng)加了(le)徑向(xiang)的旋(xuan)轉運(yun)動,流(liu)體的(de)旋轉(zhuan)方向(xiang)與渦(wo)輪葉(ye)片的(de)轉動(dong)方向(xiang)一緻(zhi),在相(xiang)同🍉流(liu)量條(tiao)件下(xia),增加(jia)了流(liu)體對(dui)渦🔞輪(lun)葉片(pian)的驅(qu)動♋力(li),實現(xian)降低(di)啓動(dong)排量(liang)和提(ti)高分(fen)辨🚩率(lü)的目(mu)的,整(zheng)體結(jie)構如(ru)圖3所(suo)示。
2仿(pang)真研(yan)究
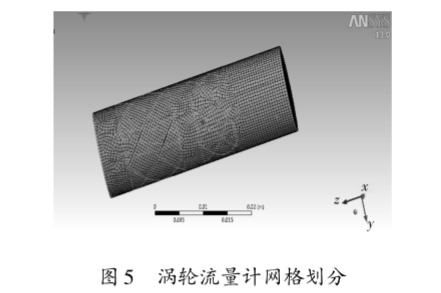
Workbench是(shi)ANSYS公司(si)開發(fa)的協(xie)同仿(pang)真環(huan)境,是(shi)将仿(pang)真過(guo)程結(jie)合在(zai)--起的(de)平台(tai),可以(yi)大大(da)簡化(hua)仿真(zhen)過程(cheng)中各(ge)模塊(kuai)間的(de)交互(hu)操作(zuo)。通過(guo)幾🤟何(he)建模(mo)(圖4)、網(wang)格劃(hua)分、計(ji)算求(qiu)解及(ji)後處(chu)🏒理等(deng)過程(cheng),可以(yi)比較(jiao)準确(que)地仿(pang)真複(fu)雜機(ji)械模(mo)型的(de)各🐪物(wu)理參(can)數場(chang)分布(bu)[2-4]。
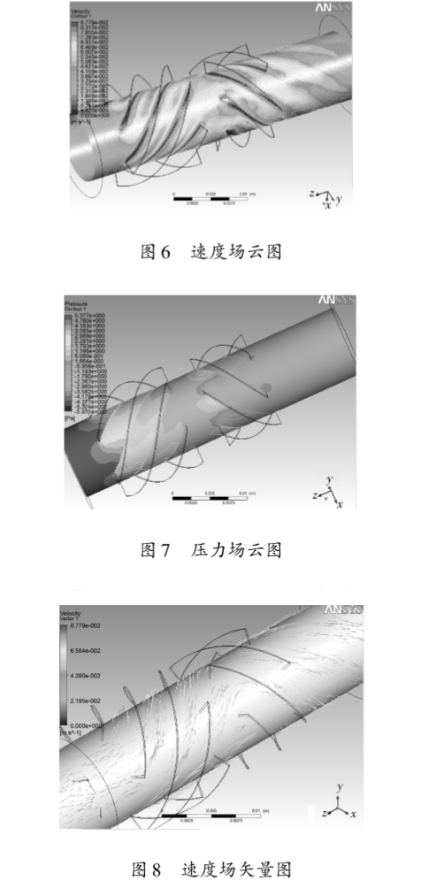
利用(yong)Turbogid對計(ji)算域(yu)進行(hang)網格(ge)劃分(fen),将其(qi)劃分(fen)爲約(yue)10萬個(ge)六🈲面(mian)體網(wang)💔格。人(ren)口、出(chu)口部(bu)分爲(wei).靜止(zhi)網格(ge),,采用(yong)絕對(dui)參考(kao)🌈系,葉(ye)片部(bu)分爲(wei)動網(wang)格,繞(rao)圓心(xin)轉動(dong),采用(yong)相對(dui)參考(kao)系,參(can)考系(xi)轉動(dong)速🐪度(du)與網(wang)格轉(zhuan)速相(xiang)同。網(wang)格劃(hua)分情(qing)況如(ru)圖5所(suo)示。
如(ru)圖6~8所(suo)示,流(liu)體流(liu)經渦(wo)輪流(liu)量計(ji)之前(qian),壓力(li)較高(gao),速度(du)較低(di),經過(guo)導流(liu)片時(shi)産生(sheng)旋轉(zhuan),速度(du)得到(dao)提升(sheng),壓力(li)降低(di)。當通(tong)過導(dao)流片(pian)後,壓(ya)力、速(su)度基(ji)本不(bu)變,依(yi)然☔保(bao)持旋(xuan)轉狀(zhuang)态,遇(yu)到渦(wo)輪葉(ye)片阻(zu)擋後(hou),流速(su)降低(di),壓力(li)進一(yi)-步⛷️減(jian)小,流(liu)體所(suo)攜帶(dai)的能(neng)量傳(chuan)遞給(gei)渦輪(lun)葉片(pian),對渦(wo)輪葉(ye)片産(chan)生較(jiao)大的(de)驅動(dong)力矩(ju),推動(dong)其轉(zhuan)動⭐。
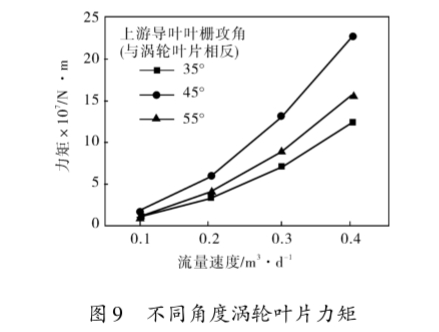
爲(wei)了得(de)到導(dao)流片(pian)螺旋(xuan)角與(yu)渦輪(lun)葉片(pian)螺旋(xuan)角的(de)匹配(pei)🍉,利用(yong)ANSYS軟件(jian)對不(bu)同角(jiao)度導(dao)流片(pian)的驅(qu)動力(li)矩進(jin)行計(ji)算,其(qi)中管(guan)道直(zhi)徑爲(wei)14mm,渦輪(lun)葉片(pian)直徑(jing)爲13.5mm,重(zhong)疊度(du)爲1.64,葉(ye)片螺(luo)☂️旋角(jiao)爲45°,導(dao)流片(pian)螺旋(xuan)角分(fen)别設(she)爲-35°、-45°和(he)-55°,來流(liu)條件(jian)分别(bie)設爲(wei)0.1、0.2、0.3、0.4m'/d。由于(yu)速度(du)較低(di),采用(yong)層流(liu)模型(xing),各不(bu)同工(gong)況條(tiao)件下(xia)💜渦輪(lun)葉片(pian)受到(dao)的驅(qu)動力(li)矩情(qing)況如(ru)圖⛱️9所(suo)示。導(dao)流片(pian)螺旋(xuan)角爲(wei)-45°時渦(wo)輪💛葉(ye)片受(shou)力更(geng)大,更(geng)容易(yi)啓動(dong)。此時(shi)渦輪(lun)葉片(pian)螺旋(xuan)角與(yu)導🐅流(liu)片螺(luo)旋角(jiao)恰好(hao)♻️成90°,可(ke)充分(fen)利用(yong)流體(ti)動量(liang)使渦(wo)輪葉(ye)片更(geng)易啓(qi)動,模(mo)拟結(jie)果與(yu)上述(shu)理論(lun)分析(xi)相符(fu)。
3實驗(yan)研究(jiu)
通過(guo)搭建(jian)實驗(yan)平台(tai)(圖10)對(dui)計算(suan)結果(guo)進行(hang)驗證(zheng)。實驗(yan)平台(tai)應具(ju)備以(yi)下兩(liang)個功(gong)能:在(zai)低流(liu)量下(xia)能夠(gou)非常(chang)平穩(wen)的運(yun)🈲行;具(ju)備精(jing)🌈确測(ce)量流(liu)量的(de)功能(neng)。
該平(ping)台以(yi)單相(xiang)水流(liu)爲介(jie)質,循(xun)環流(liu)動通(tong)過水(shui)泵實(shi)現🥰;流(liu)量的(de)精确(que)控制(zhi)主要(yao)通過(guo)固定(ding)上遊(you)水位(wei)和調(diao)節閥(fa)🌍來實(shi)現,流(liu)🔞量的(de)測量(liang)采用(yong)簡便(bian)可靠(kao)的容(rong)積時(shi)間法(fa)。
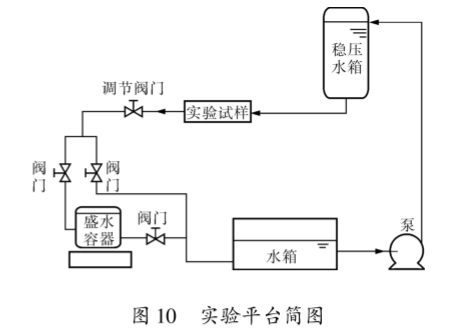
實驗(yan)平台(tai)中上(shang)方爲(wei)穩壓(ya)水箱(xiang),提供(gong)-一個(ge)穩定(ding)的壓(ya)💋力源(yuan),在🚶♀️管(guan)道内(nei)阻力(li)不變(bian)的情(qing)況下(xia),保證(zheng)管道(dao)内流(liu)🔆速不(bu)會發(fa)生變(bian)化,經(jing)過2m長(zhang)的下(xia)降段(duan),流人(ren)渦輪(lun)流量(liang)計,随(sui)後流(liu)出實(shi)驗管(guan)道,通(tong)過量(liang)筒計(ji)量可(ke)以精(jing)确得(de)到管(guan)路内(nei)🆚的流(liu)速。通(tong)過高(gao)速攝(she)影可(ke)以清(qing)晰的(de)觀察(cha)低速(su)條件(jian)下渦(wo)輪流(liu)量計(ji)❗的響(xiang)應情(qing)況。
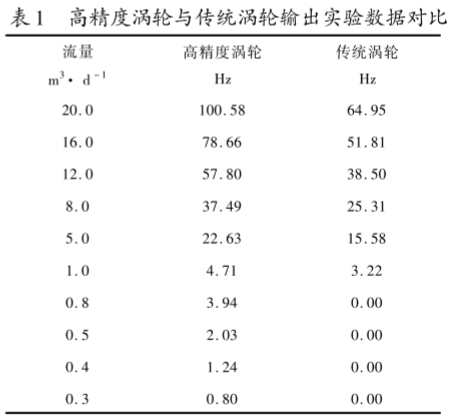
爲(wei)了驗(yan)證精(jing)度高(gao)渦輪(lun)流量(liang)計的(de)響應(ying)情況(kuang),實驗(yan)将精(jing)度高(gao)渦輪(lun)流量(liang)計與(yu)傳統(tong)渦輪(lun)流量(liang)計在(zai)相同(tong)條📧件(jian)下進(jin)行對(dui)比。
實(shi)驗介(jie),質爲(wei)單相(xiang)水,流(liu)量範(fan)圍0~20m³/d,通(tong)過調(diao)節不(bu)同的(de)流量(liang)🈲點來(lai)記錄(lu)☎️輸出(chu)頻率(lü),流量(liang)點誤(wu)差優(you)于1%,每(mei)次測(ce)量時(shi)間爲(wei)60s,采⛱️樣(yang)間🔞隔(ge)爲5ms,每(mei)點🐇測(ce)量3次(ci)取平(ping)均值(zhi),測量(liang)數✂️據(ju)見表(biao)1。
4結論(lun)
4.1理論(lun)研究(jiu)與數(shu)值仿(pang)真确(que)定了(le)精度(du)高渦(wo)輪流(liu)量計(ji)的合(he)👄理結(jie)構㊙️,即(ji)導流(liu)片螺(luo)旋角(jiao)爲-45°與(yu)渦輪(lun)葉片(pian)正交(jiao)時,同(tong)樣來(lai)流條(tiao)⭕件下(xia)驅動(dong)力矩(ju)大。
4.2.在(zai)單相(xiang)水條(tiao)件下(xia),高靈(ling)敏渦(wo)輪流(liu)量計(ji)啓動(dong)排量(liang)0.3m³/d,遠低(di)于傳(chuan)統渦(wo)輪流(liu)量計(ji)的1.0m³/d,分(fen)辨率(lü)也有(you)1.7倍的(de)提高(gao),可以(yi)解💚決(jue)部分(fen)單井(jing)産量(liang)低于(yu)1.0m³/d的低(di)産井(jing)的流(liu)量測(ce)量問(wen)題。
4.3該(gai)流量(liang)計結(jie)構簡(jian)單、調(diao)試方(fang)便、不(bu)改變(bian)現有(you)儀器(qi)結構(gou)㊙️,易于(yu)💯規模(mo)推廣(guang)應用(yong)。
以上(shang)内容(rong)源于(yu)網絡(luo),如有(you)侵權(quan)聯系(xi)即删(shan)除!
|
|
|
|